




HOME > 特別企画

メニュー


デモンストレーションセッション
-
※全てのデモンストレーションセッションの展示は13日、14日の2日を通して行います。
1F 画像センシング展会場内 SSII2013デモンストレーションセッションゾーン
(見学無料、画像センシング展入場受付をいただければ無料でご覧いただけます)
DS1-01
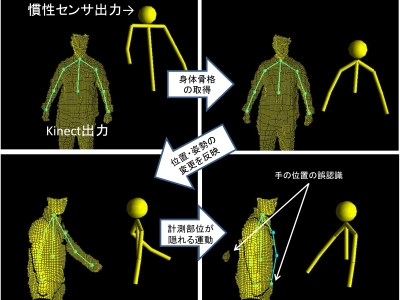
慣性式モーションキャプチャシステムにおけるKinectセンサの活用
~Kinectとウェアラブルセンサで人の運動を見る~吉永 崇・有田大作(九州先端科学技術研究所)・澤田泰輔・辻 卓則(ロジカルプロダクト)
Kinectでは安価・簡便な光学式モーションキャプチャが可能ですが、計測対象の隠れに弱いという欠点もあります。一方,我々は慣性センサを身体に装着して加速度などの運動情報をダイレクトに計測するシステムを開発しましたが、Kinectが得意とする位置計測や人体の骨格取得は困難でした。そこで本研究ではKinectと慣性センサの併用による両手法の補完に取り組み、利便性の高いモーションキャプチャを実現しました。
DS1-02
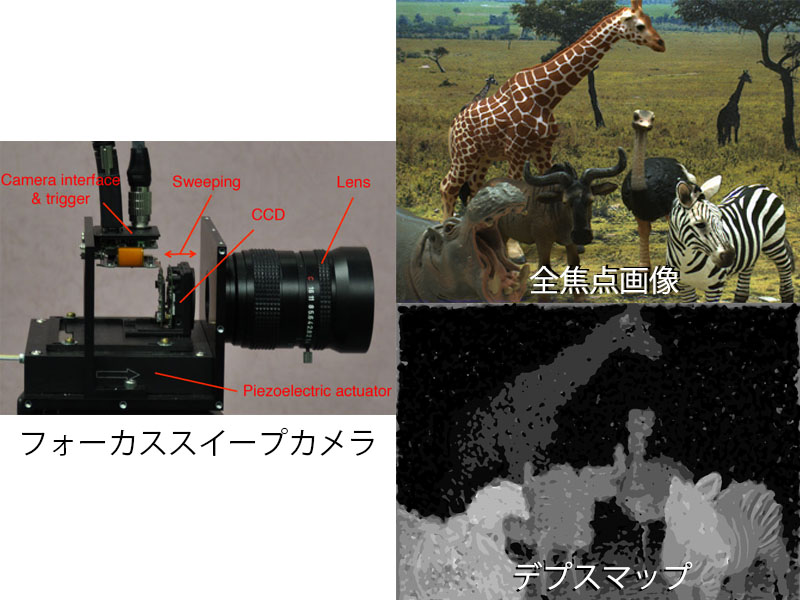
ハーフスイープ撮像によるDFD
~安定した奥行き推定のための画像センシング手法~松井修平(パナソニック)・長原 一・谷口倫一郎(九州大学)・安木俊介・河村 岳(パナソニック)
フォーカスを制御することでカメラのぼけ関数(PSF)を制御することができる、フォーカススイープカメラを開発しました。フォーカススイープカメラは、 露光時間中に撮像素子またはレンズを光軸に沿って動かすことで、多重焦点を重畳した画像が撮影できるフォーカススイープ撮像を世界で初めて提案しました。 フォーカススイープ撮像は、符号化絞りとは異なり、絞りを開放したままPSFを制御できるため、高いSN比の画像撮像が実現できるという利点を持ちます。このカメラを用いた奥行き推定(Depth from Defocus)の応用についてデモ展示を行い、通常のカメラに対して安定な推定が可能であることを示します。
DS1-03
人体検出に基づく高速な映像要約システム
~監視映像をギュッと要約、パッと見せる~吉野広太郎(オムロンソーシアルソリューションズ)・山下直晃(とめ研究所)・勞 世竑・張 海虹・倉田 剛・田畑尚弘(オムロンソーシアルソリューションズ)
近年、監視カメラの増加に伴い、カメラ映像が大量に録画されています。しかし、この映像を事後に目視で確認することは非常に手間と時間のかかる作業でした。そこでこの手間と時間を減らすために、映像を最大20倍速で自動的に要約し、人物だけを切り出して一覧表示する犯罪捜査支援システムgpVisionを開発しました。

DS1-04
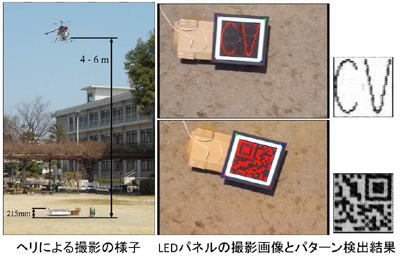
LEDパネルを用いた UAV 飛行制御システムの開発
~誰でも簡単に操縦できるラジコンヘリを目指して~浮田浩行・三輪昌史・岡部康平・造田優貴・西端宏樹(徳島大学)
無線操縦ヘリコプタ等のUAV(無人航空機)は、航空写真、農薬散布、災害救助等に使用されていますが、広範囲の飛行を目視で操縦することは熟練者でも難しいことです。ここでは、地上に設置したLEDパネルの表示内容をヘリに搭載したカメラで読み取り、位置情報や飛行経路の指示をヘリに与えることで、操縦支援、自動飛行制御を行うことを目的としており、現在、LEDパネルのパターン識別や位置算出方法を検討しています。
DS1-05
Face recognition for smart devices
~手軽で安心な個人認証をあなたのそばに!~ハオ ジャ・森下雄介・細井利憲・今岡 仁(日本電気)・今泉峻生・入澤英毅(NECソフト)
当ブースでは、スマートデバイス搭載カメラを使って手軽に利用でき、かつ個人の顔情報を安全に取り扱える顔認証システムを展示します。本システムでは、個人の顔特徴量を端末内ではなく、セキュアに管理しやすいサーバ内にのみ保持、照合します。特に、高精度な照合を実現する軽量な特徴量(512バイト)を採用したので、低速な通信環境でも利用できます。

DS1-06
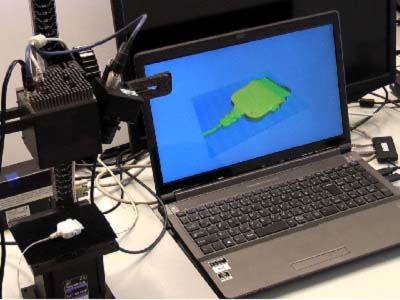
実時間高速高精度三次元形状計測表示装置
~4Dカメラによる4D表示~森本吉春・柾谷明大・高木哲史(4Dセンサー)・床井浩平(和歌山大学)
三次元形状(x,y,z)の時間(t)変化の計測を高速かつ高精度で行う4次元カメラ(4Dカメラ)を開発しました。用いている技術は、格子投影法、位相解析法、全空間テーブル化手法、光源切替位相シフト法、シャドーモアレ法、立体表示CG等です。その中でもシャドーモアレ法は平板状物体の形状を高速高精度に計測できます。
・高速:実時間処理20~1000fps
・バッチ処理20~2000fps
・高精度:1~50μm
・小型:1000cm3以下(4Dカメラ)
・安価:150万~400万円~
DS1-07
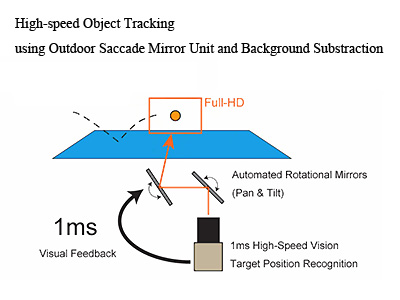
背景差分を適用した高速視線制御トラッキングシステムおよび屋外用ユニット
~動き回る物体を常に画像中心にとらえる撮像システムの、最新版ユニットとアルゴリズムの紹介~横山恵子・末石智大・奥村光平・奥 寛雅・石川正俊(東京大学)
我々は、スポーツ中継におけるボールなど、激しく動き回る物体を常に画像中心にとらえ続ける撮像システムの研究開発を続けてきました。このシステムの根幹を担うのが、サッカードミラーと呼ばれる高速な視線制御デバイスです。以前のものは、室内の限られた実験環境にのみ対応していましたが、この度、屋外用のユニットと、実環境に頑健な物体検出アルゴリズムを新たに開発したので、ご紹介いたします。
DS1-08
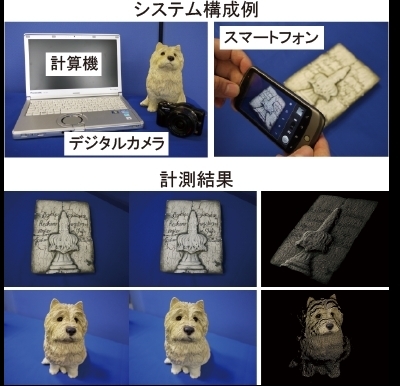
デジタルカメラを用いた簡便で高精度なステレオビジョンシステム
~誰でも簡単3次元計測~三浦 衛・酒井修二・石井純平・伊藤康一・青木孝文(東北大学)
デジタルカメラを用いて物体を2回撮影するだけで、その3次元形状を高精度かつ密に計測します。3次元計測は、さまざまな分野で注目されている技術ですが、計測には高価な装置(レーザなどの投影装置)や専門的な知識(カメラのキャリブレーション)が必要となっています。提案システムでは、このような専門的知識を必要とせずに、レーザを用いた3次元スキャナと比べてサブミリ精度での計測を行うことができます。
DS1-09
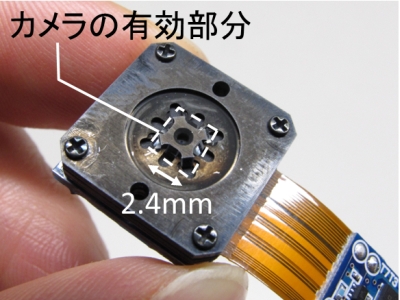
複眼式小型広角カメラ
~9つの小さな目で広い視野を見る~香川景一郎(静岡大学)・森本康裕・小林正弘(サムスン横浜研究所)・川人祥二(静岡大学)・谷田 純(大阪大学)
広角カメラは、今まで1つ広い視野をもつレンズを用いていました。我々がデモする複眼式小型広角カメラは、イメージセンサ上に配置した3×3個の小さなレンズに、視線を曲げるための直角プリズムを組合せ、ホモグラフィ変換により9つの要素画像を1つに継ぎ合わせます。今まで1つのレンズが担っていた機能を、複数のシンプルなパーツ(50°程度の狭い画角をもつレンズと直角プリズム)で担うことで、より小型の広角カメラを実現します。
DS1-10
情報投影提示「どこでもインタフェース」の開発
~「どこでも・誰でも・手ぶらで」情報入出力を可能とします!~長尾拓磨・竹村大輔・伊藤光太朗・堤 祐太・中村明生(東京電機大学)
壁や机にタッチパネル状の画像を投影、ボタンをポインティングすることで家電機器を操作可能な「どこでもインタフェース」を開発しています。カメラ・プロジェクタ・PCをユニット化、一般家庭のリビングの広さをカバーできます。手振り合図を捉え、手を追跡、停止位置にタッチパネルを投影し、指先検出によりボタン押下を判定します。 「どこでも・誰でも・手ぶらで」情報入出力を可能とするシステムです。

DS1-11
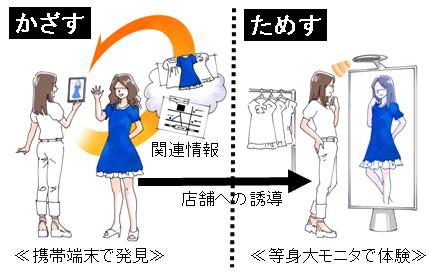
高速な物体認識、フィット感の高い画像合成を用いた購買行動支援システム
~「かざす」による行動のきっかけ、「ためす」による体験~関根真弘・大平英貴・杉田 馨・田副佑典・西山正志(東芝 研究開発センター)・伊藤 剛(東芝 デジタルプロダクツ&サービス社)
拡張現実を活用したO2O(Online to Offline)型のサービスにより、自分に合った魅力的なモノに出会えるショッピングスタイルを提案します。ユーザはまず、気になるモノに携帯端末を「かざす」ことで商品情報や店舗情報を確認し、行動のきっかけを作ります。かざした履歴はサーバに保存され、ユーザが店舗に行くと、その履歴に応じて興味のある衣服を仮想試着システムで「ためす」ことができ、購入する商品を絞り込むことができます。
DS1-12
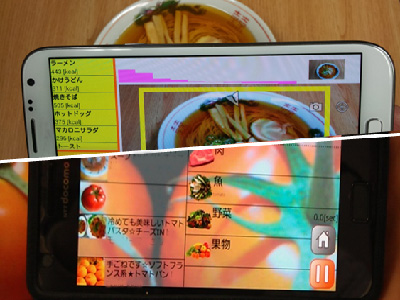
スマートフォン上でのリアルタイム食事・食材画像認識アプリケーション
~かざせば変わる、あなたの食生活~河野憲之・丸山拓馬・柳井啓司(電気通信大学)
スーパーでの買い物中、献立選びに困ったら、スマートフォンを売り場の食材にかざすだけで、瞬時にお勧めレシピが分かる。カロリーが気になるけど、食べたいなぁ、どうしよう? そんな時、食事にかざすだけで、瞬時にカロリーが分かる。本デモでは、そんなシステムのプロトタイプをご紹介します。
アネックスホール2F SSII会場内
(有料、参加登録が必要です)
DS2-01
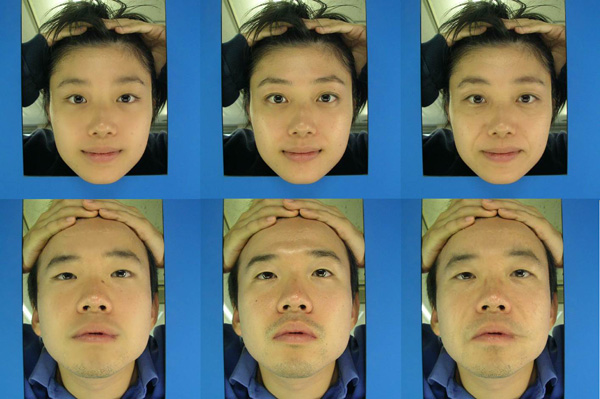
経年変化顔シミュレータ
~過去・未来の顔の予測による犯罪捜査支援を目指して~前島謙宣・森島繁生(早稲田大学)
犯罪の高度化・テロの増加を背景に、安全安心な社会実現を目的とした犯罪捜査支援システムの実現が求められており、中でも対象人物の過去・未来の顔を予測可能な経年変化顔合成技術は重要な要素技術の一つになります。今回開発した経年変化顔シミュレータは、従来手法において見られたぼけの問題を解決し、個人性を保ちつつも、皺やシミ、くすみといった加齢による特徴を再現した経年顔画像を作り出すことができます。本展示では、撮影した顔画像から経年変化顔を合成する様子を実演致します。
DS2-02
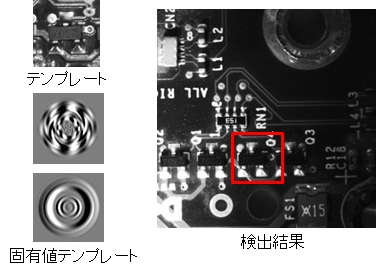
固有値テンプレート法による高速かつ高精度なパターンマッチング手法の開発
~FAへの実用化を目指した新しいパターンマッチング~上瀧 剛・矢田晃嗣郎・内村圭一(熊本大学)・菅 倫明・浅井大介・竹葉 誠(ヒカリ)
主成分分析を用いて予め用意した多数のテンプレート画像を情報圧縮することで効率よくマッチングする固有値テンプレート法を開発しました。また、照明変化や遮蔽にロバストにするためにエッジ情報を用いる改良を施しています。本手法は、部分的なエッジ輪郭線を使わずに、全画素の情報を用いて照合を行うため、見逃しが少なく安定した検出を行うことができます。また、情報圧縮により高速処理も可能です。
DS2-03
特有姿勢に基づく動作の早期認識
~遅延のないマンマシンインタフェースの実現~高 嘉泰・島田敬士・長原 一・谷口倫一郎(九州大学)
近年、人物の動作をシステムの入力に利用する動きが急速に広まっています。しかし、一般的な動作認識ではユーザの動作が完了した後に認識処理がなされていたため、ユーザとシステムとの間に大きな遅延が生じていました。この問題の解決策として、動作の途中段階で認識結果を確定する"動作の早期認識"の研究が盛んに行われています。本研究では、入力動作中に出現する"その動作に特有である姿勢(=特有姿勢)"に注目した早期認識システムを実現し、ゲーム操作インタフェースを通じてその有用性を紹介します。

DS2-04
外側・内側からの人の位置計測と計測情報の統合
~人の位置情報を用いた新しいサービスの創出~大西正輝・石川智也・興梠正克・蔵田武志(産業技術総合研究所)
顧客や従業員など人の位置に着目した実証実験が展開されています。人の位置を計測する方法としては、環境に固定されたセンサを用いる方法と、デバイスを人が持つ方法が考えられます。この2つは、不特定多数/特定少数を対象として、個人の特定が困難/容易であり、有効測定範囲が狭く/広く、絶対位置/相対位置が測定できると相反する特徴を持っています。これらの2つの方法による人の位置の計測と計測情報の統合によるデモンストレーションを行います。
DS2-05
注視を演出するコミュニケーションロボット
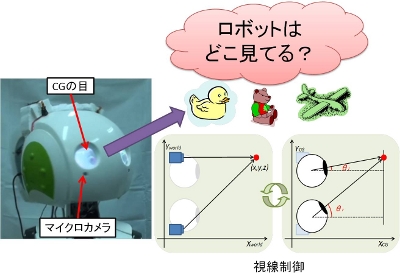
~ロボットは何を見ているのか?~小貫朋実・江連智香・石野田貴文(埼玉大学)・小林貴訓(埼玉大学,JSTさきがけ)・久野義徳(埼玉大学)
近年、人間とコミュニケーションをとるロボットの研究が盛んに行われています。特に、視線を用いたコミュニケーションは人間にとってとても重要で、これは将来、ロボットでも重要になると思われます。そこで、視線方向が読み取りやすく人間が受け入れやすい親しみやすさを持ったロボットの目のデザインを調査し、ロボット頭部へと搭載しました。ロボットの視線方向を人間が見るという共同注視が発現しやすくなる点が大きな特徴です。
DS2-06
画素削減型高速テンプレートマッチング
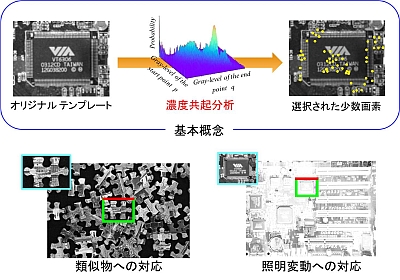
~過酷な環境下でも、目的の物体を素早く正確に見つけ出す~櫻本泰憲・斎藤正孝・橋本 学(中京大学)
物体検出のための手法として、全く新しい概念に基づく画像マッチング法を開発いたしました。従来とは異なり、画像から戦略的に選択されたごく少数の画素だけを使うことによって、超高速を実現しました。さらに、対象物と類似物(対象物と似 た偽の物体)に関する情報をあらかじめ学習させることによって、誤認識を防ぎます。また変動する照明下の画像を学習させることによって、外乱照明 に対してもきわめて強い性能を発揮しています。高信頼と高速を両立させた新しいテンプレートマッチングを、是非ご覧ください。
DS2-07
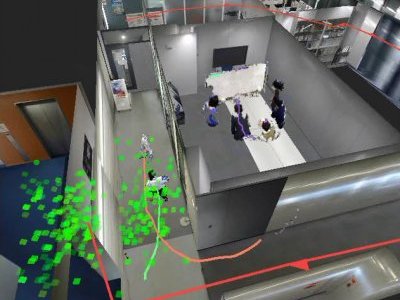
超高速マルチモーダル属性転移による実世界状況把握
~ネットから瞬時に学習してあらゆる対象を推定します~木村大毅・長谷川 修(東京工業大学)
発表者らが独自に開発を進めている“SOINN”と呼ぶ機械学習手法を活用した、マルチモーダル情報の超高速転移学習に基づく未知物体・状況推定システムをデモ展示する。展示システムは、見学者によって指定されたあらゆる対象や状況を、その対象から得られる視覚情報と深度情報、音声情報などを複合的に活用することで、良好に推定出来る。システムの視覚に関する属性情報の学習には、インターネット上の情報を用いる。下図はKinectを用いた未知物体推定の例を示す。

DS2-08
頭部姿勢変動に頑健な虹彩およびまぶた追跡による視線推定
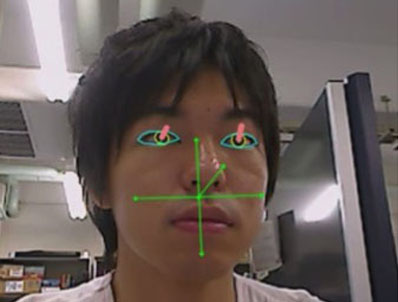
~視線による次世代インターフェースに向けて~田村仁優・橋本 潔・青木義満(慶應義塾大学)
人の視線方向には興味対象や意図などの重要な情報が含まれており、ドライバーの視線推定による事故防止やデジタルサイネージの広告効果測定に役立てる事が可能です。また、人とコンピュータをつなぐ新たなインターフェースとしても期待されています。このような応用を見据え、本システムではカメラに写っている人を検出し、その視線方向を自動で推定します。まぶたと黒目、両方の動きを精度よく追跡することで、特別な機器を使うことなく安価な市販カメラのみで実現しています。
DS2-09
超解像自由視点画像合成システム
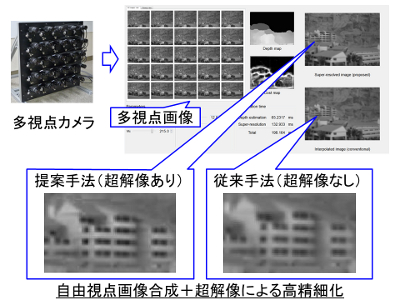
~高精細かつ高速な自由視点画像合成~中島 諒(東京大学)・浜田宏一(東京大学,日立製作所)・高橋桂太(電気通信大学)・苗村 健(東京大学)
複数のカメラで撮影された多視点画像をもとに、新しい任意の視点から見た画像(自由視点画像)を高精細かつ高速に合成するデモを行います。自由視点画像合成に再構成型超解像による高解像度化を組み込むことで、鮮鋭感の高い画像を合成することができます。また、GPU上での実装により、高速な処理を可能としました。本デモでは、多視点カメラで撮影した画像から、リアルタイムで高精細な自由視点画像を合成できることを実演いたします。
DS2-10
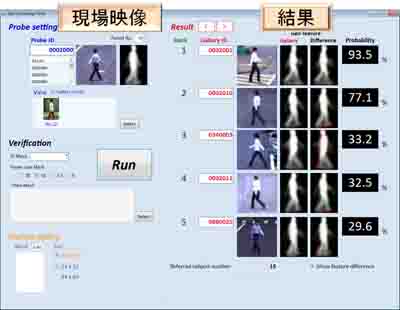
犯罪捜査支援のための歩容鑑定システム
~犯罪現場で撮影された犯人の歩き方特徴から被疑者を絞り込むための支援システム~村松大吾・槇原 靖・岩間晴之・八木康史(大阪大学)
犯罪捜査支援のための歩容鑑定システムを展示しています。犯罪現場付近を歩いている犯人映像が撮影されている場合、「歩き方」が被疑者特定の手がかりになります。展示システムは歩容の非専門家である犯罪捜査員が「歩き方」をもとに被疑者を特定できるように支援する世界初の犯罪捜査支援歩容鑑定システムです。このシステムを利用することで、簡易な操作手順によって「歩き方」から個人の認証が行えます。
DS2-11
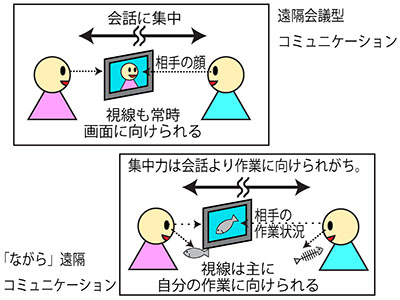
メディア処理による遠隔コミュニケーション支援のための基盤ソフトウェアIwaCam
~メディア処理をプラグインとして自由に追加できる映像コミュニケーション基盤~辻 秀典(情報技研/情報セキュリティ大学院大学)・舩冨卓哉・山肩洋子・森 信介(京都大学)
家庭内での料理や片づけなど、何かをしながら遠隔コミュニケーションをすることを、「ながら」遠隔コミュニケーションと名付け、これを支援するための基盤ソフトウェアとしてIwaCamを開発しました。IwaCamは、映像コミュニケーションを可能にする基本機能に加えて、映像・音声ストリームにアクセス可能なAPIを提供して、コミュニケーション支援を実現するメディア処理をプラグインとして実装できます。
DS2-12
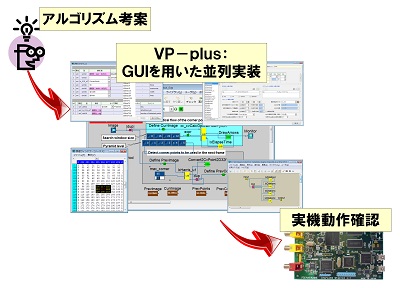
並列処理による画像認識の高速化を実現するOpenCV利用GUIプログラミング環境の提案
~画像認識処理をGUIで簡単に並列化できます~小林悠記・京 昭倫・岡崎信一郎(ルネサス エレクトロニクス)
画像認識アルゴリズムを開発する中で、並列処理による高速化を検討された方も多いと思います。しかしながら、並列プログラミング特有の言語や作法の壁に躊躇された方も多いのではないでしょうか。並列プロセッサ上での自作処理の実装や最適化は煩雑なものです。VP-plusではGUIを用いて思いついたアルゴリズムを簡単に並列実装し、実機で動作確認することができます。今回は、OpenCV互換ライブラリも加わり、ますます使いやすくなりました。
DS2-13
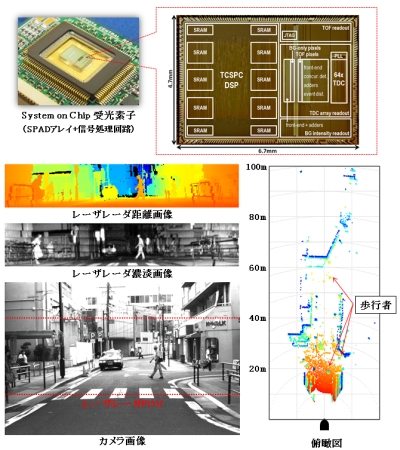
車載用イメージングレーザレーダ
~自動車の安全を高める次世代センサ~曽我峰樹・ニクラス クリスチアーノ・松原弘幸・太田充彦・小川 勝・内藤貴志(豊田中央研究所)
太陽光下で距離80mの3D情報を取得できる車載用レーザレーダを開発しました。ポリゴンミラーによる2次元走査と16画素1次元受光素子アレイを組み合わせ、202x96画素、10fpsを実現しました。レーザ照射光と外乱光を弁別するため、フォトン到来時間のヒストグラムから統計的にTime Of Flightを抽出します。この統計的信号処理回路とSPAD(Single Photon Avalanche Diode)アレイとをCMOS LSIにワンチップ化しました。