| DS1-01 |
2in1カメラシステム |
| ~1台のカメラで望遠と広角を同時に撮影~ |
| 小野 修司(富士フイルム) |
 |
|
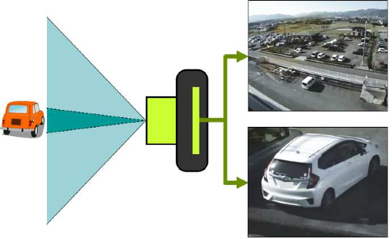
「2in1カメラ」は、1台のカメラで広角と望遠の映像を同時に撮影したり、遠景と近景のそれぞれにピントの合った映像を同時に撮影することができる世界初の技術です。
2種の映像の撮影には、メカ駆動や切り替え機構を必要としませんので、従来のカメラを2台並べる方式や、ズーム・切り替え方式に比べて、サイズ、コスト、制御性に優れます。 |
|
| DS1-02 |
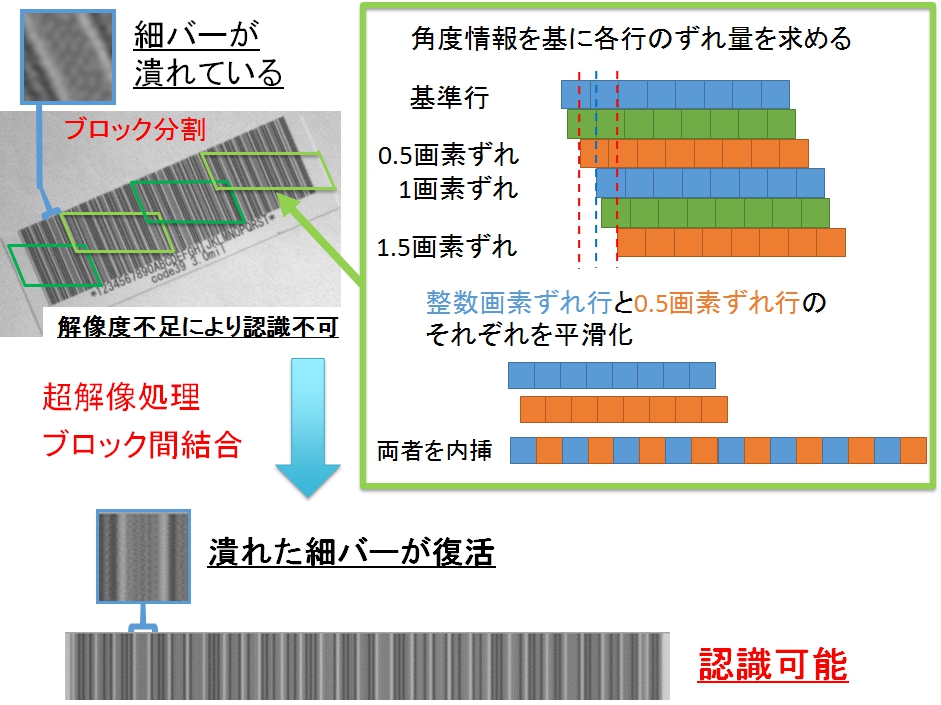
超解像バーコードリーダー:画素限界を超えて読取る |
| 低画素の1次元バーコード画像を超解像処理により読み取り可能に |
| 堀田和也(電気通信大学),鈴木裕太(電気通信大学),西 一樹(電気通信大学),白井直哉(オプトエレクトロニクス),丑木 崇(オプトエレクトロニクス) |
 |
|
バーコードリーダーには、レーザースキャン方式と共にカメラ撮影によるイメージスキャン方式が普及しています。後者は読み取り性能がカメラに依存してしまい、特に細いバーコードに対しては、解像度不足で読み取れないという問題がありました。本研究では、そのような1次元バーコード画像に対して、ブロック分割と超解像処理を施すことにより読み取り性能を大幅に向上させ、処理の最適化を行うことで実システムに実装しました。
|
|
| DS1-03 |
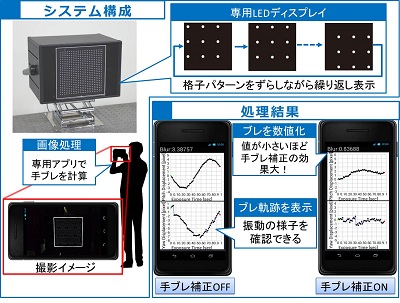
Smart Shake Analyzer:スマートフォンカメラの手ブレ補正効果を測
る |
| ~撮ったその場で手ブレ補正効果を手軽にチェック!~ |
| 松田雄一(電気通信大学),岩田理生(電気通信大学),西 一樹(電気
通信大学),長田宏二(壺坂電機) |
 |
|
我々が開発を進めている「手ブレ計測システム」は動画テストチャートを撮影し画像解析することで、カメラの3軸回転運動(yaw、pitch、roll)の手ブレ軌跡の検出や手ブレ補正の定量評価が可能です。今回は、これをスマートフォンカメラ対応のアプリケーションとして実装した「Smart Shake Analyzer」を紹介いたします。スマートフォンで動画テストチャートを撮影した後、専用のアプリケーションを実行するだけでスマートフォンの画面上で手ブレ軌跡や手ブレ量を確認することができます。
|
|
| DS1-04 |
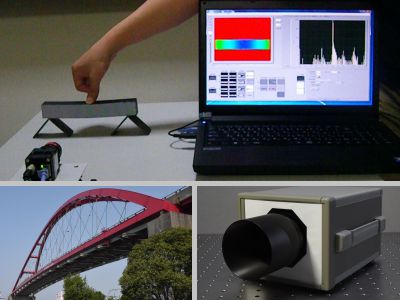
サンプリングモアレ法による構造物の変位・ひずみ計測
|
| ~カメラ撮影だけで簡単・高速・高精度に分布計測できます!~ |
| 楠 芳之,森本吉春,柾谷明大,高木哲史(4Dセンサー) |
|
|
特許技術を利用したサンプリングモアレカメラにより構造物の変位・ひずみ計測を実現します。変位計測の精度は格子ピッチの1/100〜1/1000程度で計測でき、格子を貼ったすべての場所について分布計測できます。格子ピッチ・レンズシステムを交換することにより、微小物体から遠距離にある構造物まで精度よく計測することができます。さまざまなインフラの保守点検をはじめ一般構造物の変位・ひずみ分布計測に利用できる技術です。
|
|
| DS1-05 |
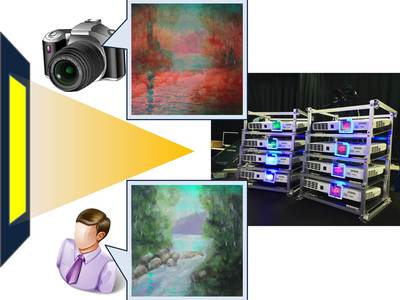
マルチバンドプロジェクタを用いた多重画像投影 |
| ~人ごとに異なる番組を視聴できる不思議なテレビ~ |
| 村松晃司,野々山誠人,坂上文彦,佐藤 淳(名古屋工業大学) |
 |
|
我々は見る人ごとに異なる映像を視聴可能な、新しい映像提示技術を提案します。この方法では、観測者の視覚特性に合わせて提示映像を合成することで、人ごとに異なる映像を提示することができます。さらにこの技術を用いて左右の目に異なる映像を提示すれば、裸眼立体視も実現することができます。展示ではビデオカメラと人間に異なる映像を提示するデモを行っていますので、ぜひお越しください。
|
|
| DS1-06 |
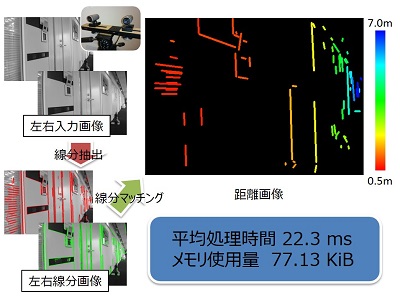
リアルタイム距離計測のためのフレームバッファの不要なステレオ線分マッチング手法 |
| ステレオWebカメラでリアルタイム距離計測 |
| 臼田稔宏、秋山隼哉、堀俊彦、渡邉孝信(早稲田大学) |
 |
|
近年、自動車の衝突回避支援システム等の開発に向け、リアルタイムで距離計測を行うためのステレオマッチング技術の研究が進んでいます。本手法では、1回のループで処理が完結する1-pass処理を実装したステレオ線分マッチングを行います。これによりリアルタイム距離計測を実現しました。また本手法はフレームバッファが不要なため、距離計測システムの小型軽量化が見込め、ドローン等のロボットへのシステムの搭載も考えています。
|
|
| DS1-07 |
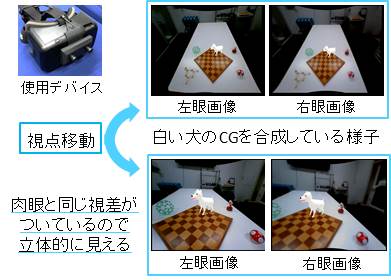
複数のカメラでリアルタイム動作する3DマーカーレスARシステム |
| ~どこでも使える、立体感あるARシステム~ |
| 秋山隼哉,臼田稔宏,堀 俊彦,渡邉孝信(早稲田大学) |
 |
|
ステレオカメラで撮影した画像をリアルタイムに処理し、ヘッドマウントディスプレイに表示するARシステムを開発しました。使用しているアルゴリズムの「DualPTAM」は、ビジュアルマーカーのような事前情報を使うことなく空間中の同じ位置にCGを合成し続けることができるため、場所によらない使用が可能です。また、ステレオカメラが人の目と同様な視差を持つため、肉眼に似た立体感を感じることができる高い没入感を持つシステムとなっています。
|
|
| DS1-08 |
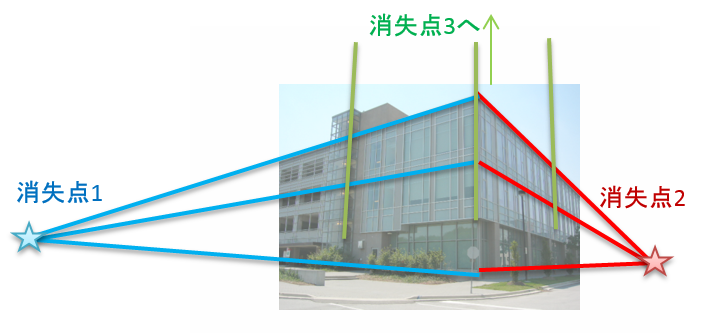
高精度リアルタイム消失点検出アルゴリズムの開発 |
| ~UAVの自律飛行に向けて~ |
| 堀 俊彦(早稲田大学)、秋山隼哉(早稲田大学)、臼田稔宏(早稲田大学)、渡邉孝信(早稲田大学) |
 |
|
自動車やドローンなどの自律制御の研究進展に伴い、搭載カメラの画像情報から姿勢や位置を認識する技術に対する要求が高まってきています。
また、被写体空間の平行線群の延長線を画像平面に投影した際に収束する点、すなわち「消失点」を3つ検出することで、自身の姿勢を高い精度で
判別することが期待されています。今回はその「消失点」を高速かつ高精度に検出できるアルゴリズムについて発表させていただきます。
|
|
| DS1-09 |
タブレット端末向けの実写画像への印刷物配置シミュレーションシステム |
| ~広告物の見栄えを簡単にシミュレーション!~ |
| 吉田浩之(リコーITソリューションズ),岡本拓也(リコーITソリューションズ),斎藤英雄(慶應義塾大学) |
 |
|
従来から広告看板発注者の8割は、広告を設置した時のイメージが出来ていないという問題がありました。このために、広告看板制作者は広告発注者に完成予想図を簡単に提供できるシステムを開発しました。このシステムを利用することによって、看板などの広告物を作製する前に、広告物のレイアウトを簡単にシミュレーションできます。既存の写真や円柱・角柱に配置できます。
|
|
| DS1-10 |
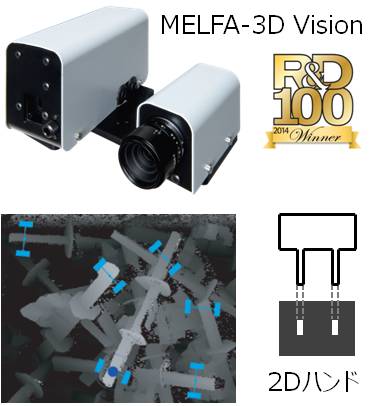
Fast Graspability Evaluationに基づく多品種部品供給を実現するMELFA-3D Vision |
| ~部品形状に依存しない高速バラ積みピッキングシステムを実現~ |
| 川西亮輔(三菱電機)、堂前幸康(三菱電機)、奥田晴久(三菱電機) |
 |
|
バラ積み部品を操作するための産業用ロボット向け3次元センサの製品化が進んでおります。それらの製品に搭載されている物体認識アルゴリズムの多くは計測データと物体モデルの照合に基づいており、認識した姿勢に応じてロボットの把持姿勢を計算するものです。当社製品であるMELFA-3D Visionは、ロボットハンドの断面射影モデルと部品を計測した距離画像をマッチングすることで、高速に物体の把持姿勢を計算する手法を開発しました。これにより物体形状に依存しない部品供給システムを実現しました。
|
|
| DS1-11 |
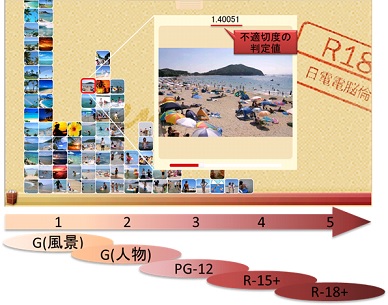
畳み込みニューラルネットワークを用いた回帰モデルによる不適切画像評価システム |
| ~あなたの目となって画像を判定します~ |
| 中江俊博、長森藤江、長谷川将平、池松大志、井前麻理子、宮下直也、木全英明(NTTコムウェア株式会社) |
 |
|
人が画像から受ける感性の連続性を考慮した不適切画像評価システムを提案します。画像は適切か否かの二値で明確に分類できるものではなく、その刺激の強さには幅があります。そこで私たちは畳み込みニューラルネットワーク(CNN)回帰モデルを用いて画像の不適切度を一次元の実数値で推定することで、不適切度の強弱を連続的に表現しています。本システムを応用することで、不適切度の基準を柔軟に設定可能なコンテンツフィルタリングが実現できます。デモ会場では、キーワード検索でネットから収集した画像を不適切度順に表示するシステムを展示しています。
|
|
| DS1-12 |
大規模ユーザー下における高速認証可能な指紋認証エンジン |
|
| 久田康弘(Liquid) |
|
|
|
|
|
| DS1-13 |
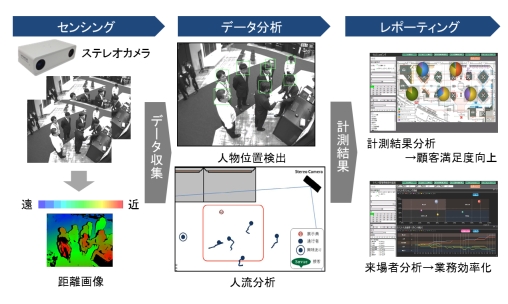
ステレオセンシングによる人間行動分析 |
| ~行動データ分析で新たな気づきを提供したい~ |
| 伊藤誠也,笹谷 聡,三好雅則(日立製作所),澤山敦士(日立INSソフトウェア),野宮正嗣(日立製作所) |
 |
|
ショッピングセンターやイベント会場での人の行動を分析することができれば、見過ごしたり、先入観で捉えていた、空間内での人々の行動から、これまで気づかなかった新たな価値を見出すことができるかもしれません。
本展示では、ステレオカメラによる人の流れや行動などのセンシング技術と、
センシング結果を用いた行動分析のデモをご紹介します。
|
|
| DS1-14 |
LEDパネルを用いた情報提示によるUAVの飛行制御 |
| ~安全・確実なUAVの自動飛行を目指して~ |
| 浮田浩行(徳島大学),三輪昌史(徳島大学),茶谷直希(徳島大学) |
 |
|
地上に設置したLEDパネルの表示内容を、UAV(無人航空機)に搭載したカメラで読み取り、位置情報や飛行経路の指示をUAVに与えることで、目視では操縦が難しい広い範囲における自動飛行制御を目的としています。現在,特定の色パターンの点滅によるLEDパネルの探索について検討しており、その処理と、これまでのパネル表示内容の読み取り処理を組み合わせて、表示内容に応じた機体の制御実験を行っています。
|
|
| DS2-01 |
高速三次元手指認識に基づく仮想タンジブルユーザーインターフェース
|
| 立体オブジェクトを押したり、回したり、持ち上げたりして操作する新感覚のユーザーインターフェース
|
| 草野 巧、小室 孝(埼玉大学)
|
 |
|
立体表示された三次元仮想オブジェクトを直接触って操作するユーザーインターフェースシステムを開発した。高速ステレオカメラを用いて手指の三次元認識を行っており、手とオブジェクトの時間的・空間的同期精度が高められている。それにより、ユーザーはオブジェクトの操作において、高い実体感を得ることができる。オブジェクトを押す、回す、持ち上げるなどの多様な操作が実現されており、デザイン支援や動的シミュレーション、アミューズメントなど、多様な分野への応用が可能である。
|
|
| DS2-02 |
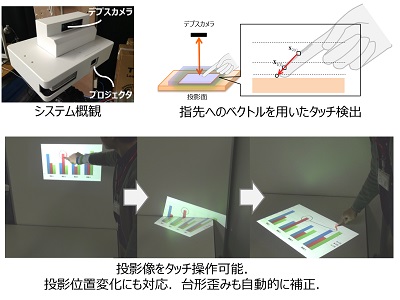
プロジェクタとデプスカメラを用いた投影面タッチUIの開発と操作性向上
|
| ~壁や机を有効活用.タッチパネル感覚で自由なプロジェクション操作~
|
| 渡邉 航(東芝), 小曳 尚(東芝),武山泰豊(東芝),馬場雅裕(東芝)
|
 |
|
デプスカメラを使ってプロジェクタ投影像へのタッチ操作を可能にする投影面タッチUIシステムを提案します。指先方向へのベクトルを利用した、ユーザの意図した位置との乖離の少ないタッチ検出手法、投影位置変化後も再推定作業が不要なデプスカメラからプロジェクタへの座標変換手法、デプス値から推定した投影面形状に基づく自動台形補正を組み合わせることにより、投影面タッチUIの利便性と操作性を向上させました。
|
|
| DS2-03 |
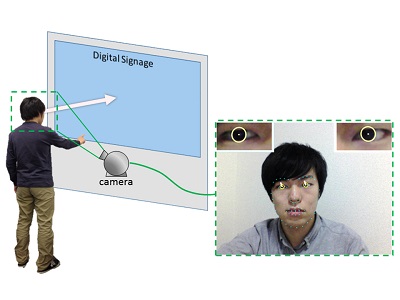
実利用に向けた視線推定
|
| ~視線を利用した次世代デジタルサイネージ~
|
| 田村仁優(慶応義塾大学)、青木義満(慶応義塾大学)
|
 |
|
カメラを用いてジェスチャーなど人にとって直感的な動作を認識し、HCIに役立てる動きが盛んとなっています。その中でも、ヒトの視線には意図や興味対象など重要な情報が含まれるため、視線方向の推定技術は各分野で求められています。本デモンストレーションでは、単眼カメラによる簡便な視線推定技術により来場者をセンシングし、視線を利用した実社会における応用例を紹介いたします。
|
|
| DS2-04 |
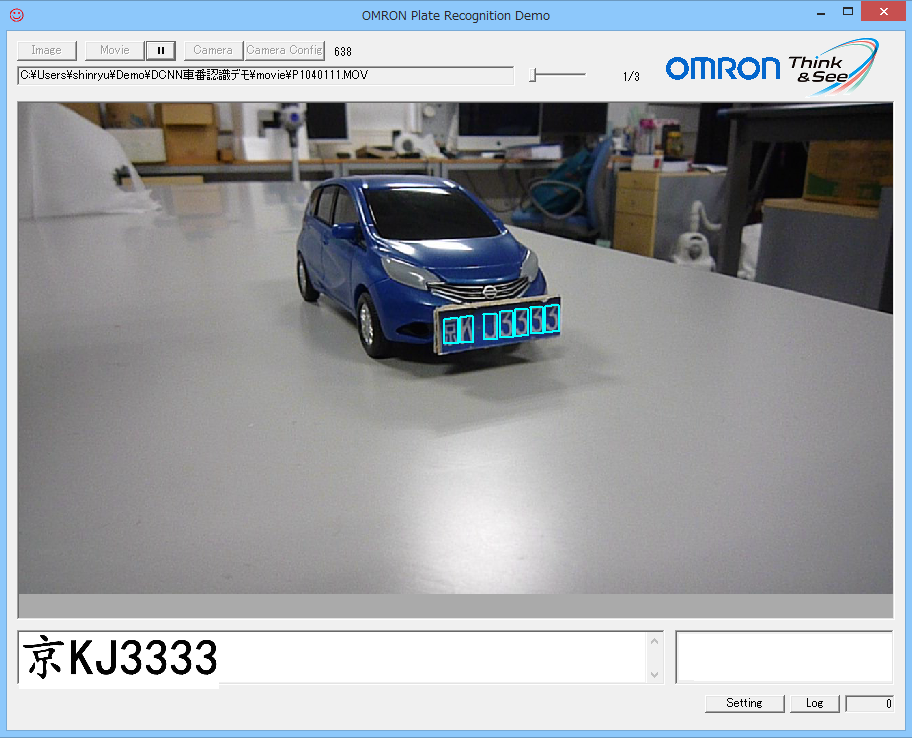
Deep Convolutional Neural Network による文字認識
|
| ~リアルタイムで高精度にナンバープレートを認識~
|
| 神谷龍司(中部大学)、山下隆義(中部大学)、濱走秀人(オムロン)、山内悠嗣(中部大学)、藤吉弘亘(中部大学)、川出雅人(オムロン)
|
 |
|
画像認識などで高精度な認識率を達成しているDeep Convolutional Neural Network (DCNN) による高精度なナンバープレート文字認識です。
デモでは、撮影した映像から文字領域の切り出し後、DCNNにより文字認識を行います。
本デモは、照明変化が生じるさまざまなシーンにおいて、高精度な認識が可能です。
また、低解像度の画像を入力することで1文字あたり1.3msでの認識を実現しています。
|
|
| DS2-05 |
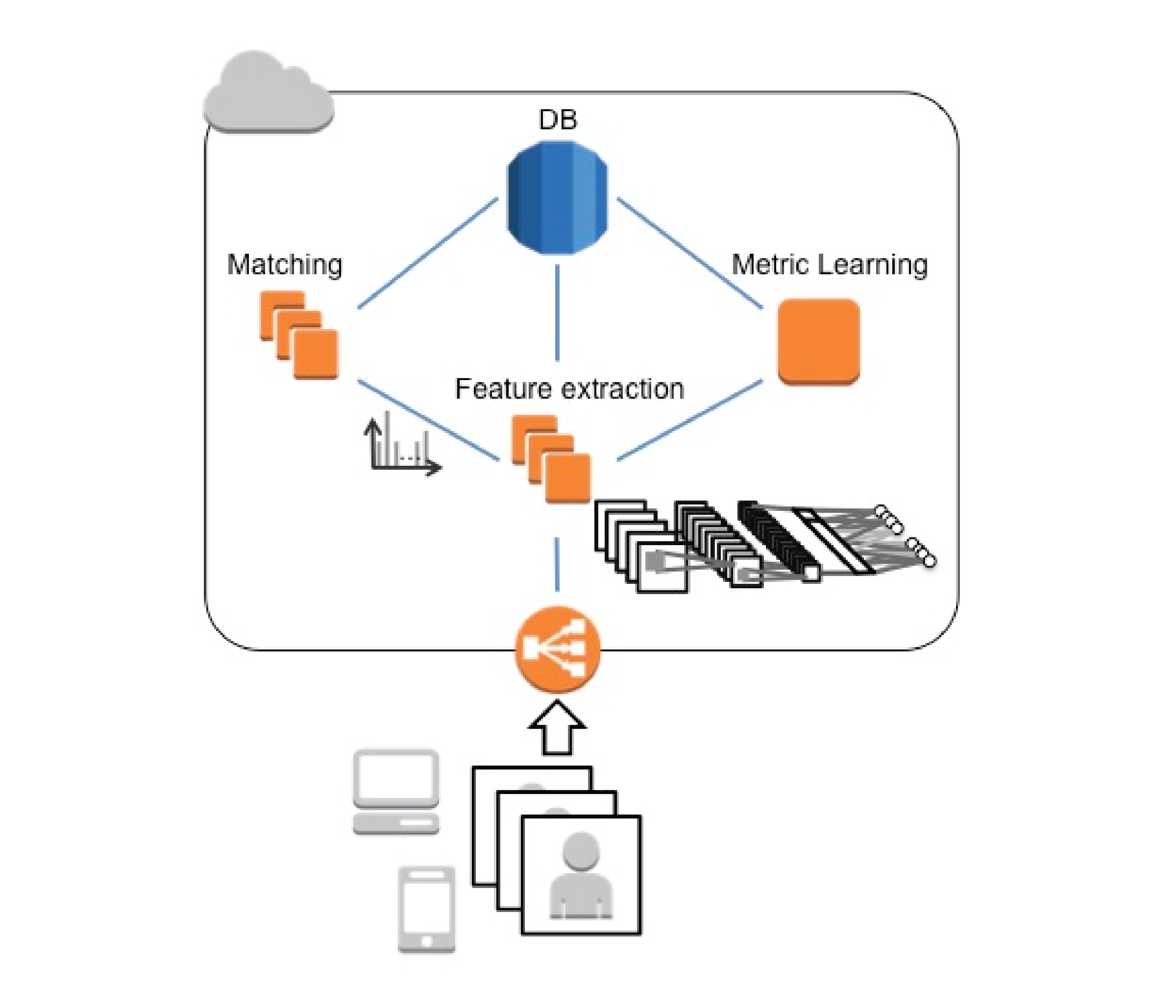
Deep Convolutional Neural Network を用いたスケーラルなクラウド型顔認証システム
|
| クラウド技術とDeep Learningの技術を応用した,柔軟かつ高負荷に耐えうる顔認証システム
|
| 古森崇史(ABEJA Inc.)
|
 |
|
Webやクラウド技術とDeep Learningの技術を組み合わせることで、高性能かつ大量のトラフィックを処理可能な顔認証のシステムを構築しました。必要なときに、必要なだけの計算能力を並列に確保することができ、WebAPI経由で利用できるため、非常に簡単にDeep Learningの技術をアプリケーションに組み込むことが可能です。
|
|
| DS2-06 |
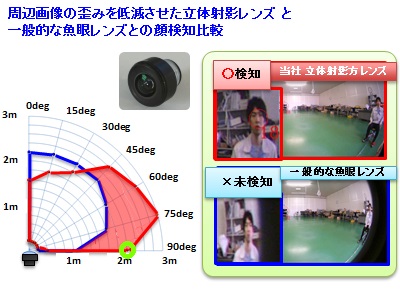
立体射影型超広角レンズを用いた物体検出の優位性
|
| 物体検出能力を高めるレンズユニットの提案
|
| 渡邊俊樹(トヨテック)、坂田拓哉(トヨテック)、小川征史(トヨテック)
|
 |
|
顔検出や人検出に代表される物体検出では、広い範囲を撮影することが可能な(超)広角レンズが求められています。しかし、超広角レンズの広角側では、レンズ歪みの影響で周辺画像が歪み、本来のエッジ情報等を得ることができないため、物体検出の性能が低下する問題があります。
本研究では立体射影と呼ばれる射影方式に基づき、レンズ歪みを制御して周辺部をより大きく映すことで、周辺画像の歪を低減させた超広角レンズを用いて、
物体検出の優位性について評価、提案いたします。
その他、広角で歪がないレンズなどデモいたします。
|
|
| DS2-07 |
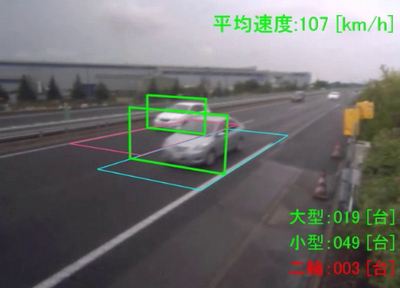
映像処理による交通量計測システム
|
| 隠蔽・環境変化に強い高精度な車両検出・速度計測を実現
|
| 今中規景、渡辺孝光、渡辺孝弘(沖電気工業株式会社)
|
 |
|
映像を処理して車両の通過を計測する交通量計測システムを開発しました。
映像中の車両の前面位置と通過時刻との関係から、ハフ変換により、車両の通過を検出し、速度を計測する方式を採用することで、隠蔽・環境変化に強い高精度な車両検出・速度計測を実現しました。
本方式により、高さ2.5mの低い位置に設置したカメラから、昼・夜、晴天・降雨などの多様な環境で、車両の検出精度95%以上、速度誤差率5%以内を達成しました。
|
|
| DS2-08 |
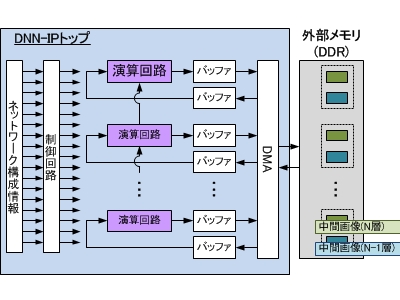
Deep Neural Networks(DNN)による車載向け画像認識ハードウェアの開発
|
| ネットワークに対して柔軟,要求処理時間に応じてスケーラブルなDNN専用ハードウェア
|
| 尾崎智章・蓑谷顕一・杉山尚樹(デンソー)
|
 |
|
DNNを用いた画像認識技術の先進運転支援システムへの適用が期待されています。その実現手段としてGPUは有力な候補の一つですが、依然として消費電力とコストの面で懸念があります。そこで今回、我々はDNNのハードウェアIP化を試みました。本IPは、ネットワーク構成に対する柔軟性と、コストと処理時間のトレードオフを図るためのスケーラビリティを備えています。また、処理の大半を占める畳み込み演算に最適な回路アーキテクチャを採用するなどして小型・低消費を実現しています。
|
|
| DS2-09 |
二値共起特徴量とSPADEを用いた高速物体認識技術の車載用組み込み半導体への実装
|
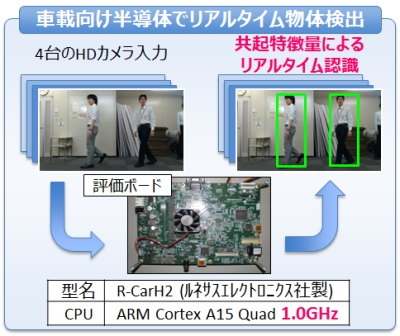
| ~車載向け半導体でHDカメラ4台のリアルタイム物体認識~
|
| 大石悠貴(デンソー)・清水幹郎(デンソー)・安倍 満(デンソーアイティーラボラトリ)
|
 |
|
識別器の識別性能を高める手法として特徴次元数を高める共起特徴量が知られていますが、消費電力や発熱の制約から処理性能が低い車載組み込み半導体で実時間処理するのは一般に難しいといわれています。
今回、高速に共起特徴量計算が可能な二値共起特徴量と、高速に識別処理が可能なSPADE(Scalar Product Accelerator by integer DEcomposition)技術により、HD4カメラ同時処理可能な実時間物体認識システムを実現できました。
|
|
| DS2-10 |
低コストなスタンドアロン型将棋ロボットシステム
|
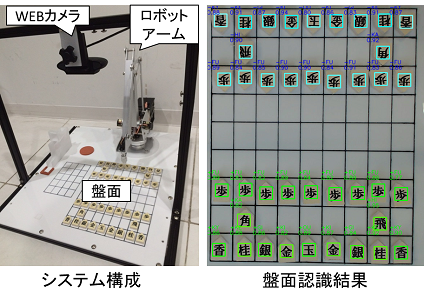
| 人間とロボットの本将棋による対局ができます
|
| 目野 誠(熊本大学)、矢田晃嗣郎(熊本大学)、上瀧 剛(熊本大学)、内村圭一(熊本大学)
|
 |
|
低コストながらも、人間との本将棋の対局が可能なシステムを開発しました。本システムは、駒把持用の小型ロボットアームおよび盤面撮影用のWEBカメラ、駒認識アルゴリズム、思考ルーチンで構成されています。駒認識アルゴリズムにはテンプレートマッチングを用いることで、正確な駒の認識が可能です。思考ルーチンを内包するため、システム単体で人間との対局が可能です。ぜひ、デモ展示場にて対局してみてください。
|
|