SSII2014ハイライト発表のご案内 第20回画像センシングシンポジウム(SSII2014)で発表される研究開発成果の中から、同時開催されている画像センシング展への多くの参加者に向けての直接的なアピールを図るべく、特に注目度の高い画像センシング技術やシステムに関するものをピックアップし、多くの参加者が集まる画像センシング展内の講演ブース(パシフィコ横浜 画像センシング展 会場内 特設セミナールーム)において、「SSII2014ハイライト発表」と題して、ご紹介する機会を設けました。 画像センシングシンポジウムハイライト発表 プログラム 6月12日(木) 13:10~14:00 画像センシング展 会場内 特設セミナールーム ※画像センシングシンポジウム(SSII/アネックスホール)へのご入場は有料となります。 6月13日(金) 13:10~14:00 画像センシング展 会場内 特設セミナールーム ※画像センシングシンポジウム(SSII/アネックスホール)へのご入場は有料となります。
これを通じて、SSIIが目指して参りました、最先端技術の実用化への橋渡しの役割を、さらに進めることができるのではないかと期待しております。ショートオーラルセッションでは聞けない、踏み込んだ内容をご紹介いただけますので、是非こちらもご聴講下さい。
なお、本プログラムの聴講は無料ですが、第20回画像センシングシンポジウム(SSII2014/アネックスホール)へのご入場は有料となります。
DS1-03
13:10~13:18
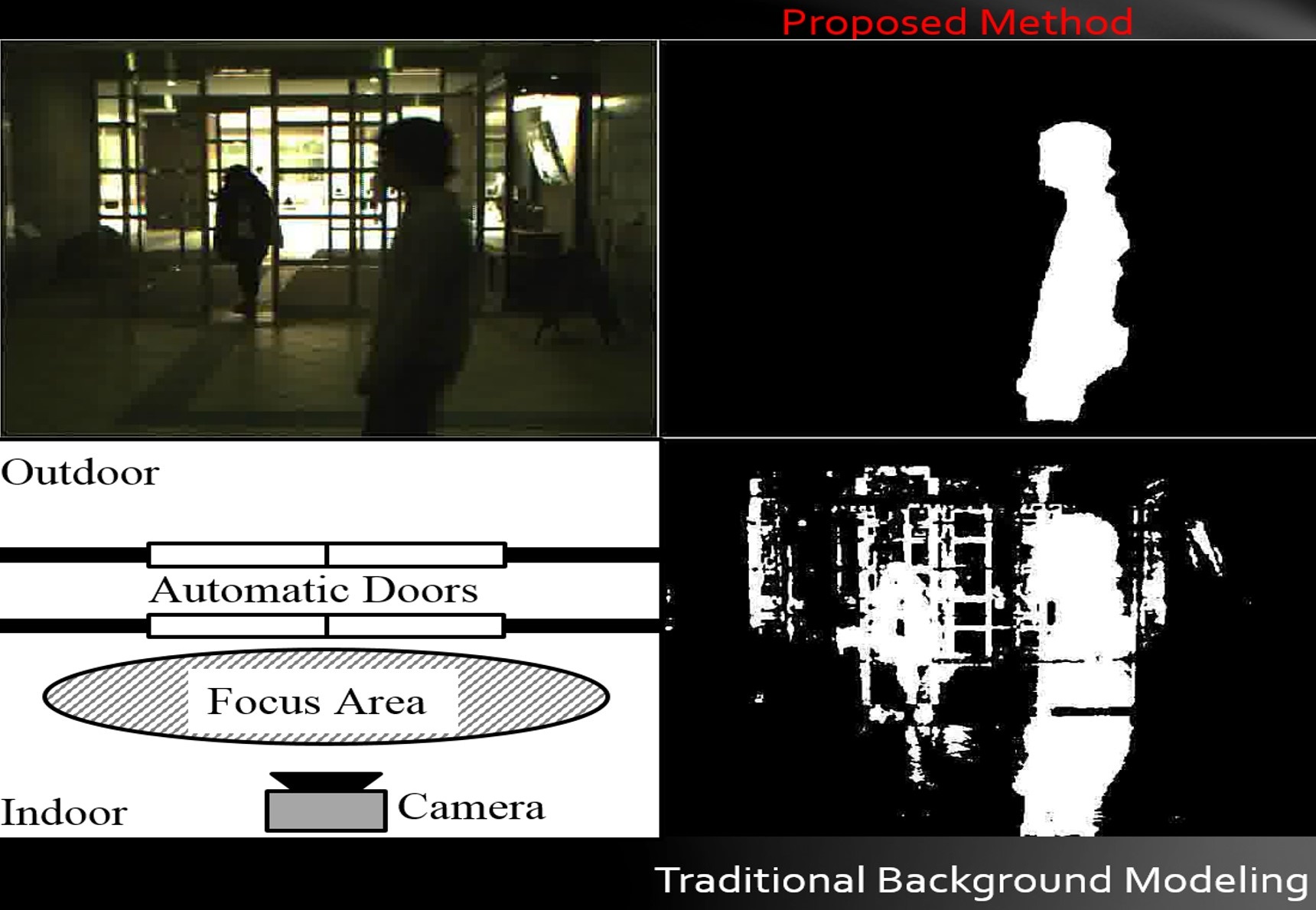
匿名カメラ
~プライバシーを光学的に隠蔽する監視カメラシステム~
張 宇鵬(九州大学),長原 一(九州大学),谷口倫一郎(九州大学)

現在、街角には多くの監視カメラが設置され、防犯などその有用性が注目される一方で、取られる側のプライバシーが大きな社会問題となっている。本研究では,撮影画像から人顔を光学的に排除する「匿名カメラ」を提案する。匿名カメラは、赤外線カメラから検出される顔領域をもとに、カメラ内に搭載された液晶素子で顔を光学的にマスク撮影する。本手法では、根本的に顔が撮影されないため、従来の後処理によるプライバシー保護法に比べ、被撮影者の心理的抵抗も大幅に低減できる。
※画像センシング展内デモンストレーションゾーンで、展示を行っています。(11日~13日)
DS2-01
13:20~13:28
生成型学習による歪みにロバストな高速印字認識システム
~FA分野への適用を目的とした新たな文字認識フレームワークの提案~
村井泰裕(日立産業制御ソリューションズ),桐生 望(日立産業制御ソリューションズ),鈴木寿法(日立産業制御ソリューションズ),藤吉弘亘(中部大学)
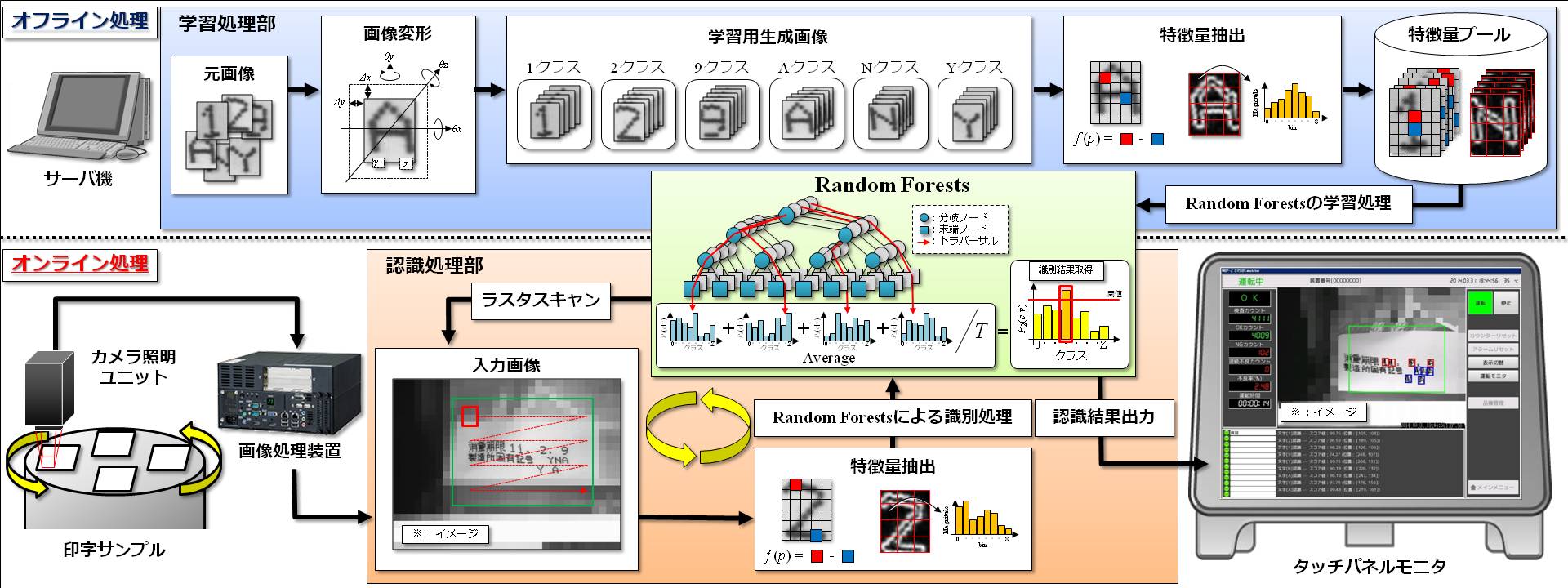
生成型学習を導入した Random Forestsを用いて、高速に歪んだ印字を認識することが可能なシステムを開発しました。本システムでは、オフラインで少数枚の印字切り出し画像に対しさまざまなパラメータで変形させた画像を自動生成し、Random Forestsの学習を行うことで識別器を構築する学習処理部と、オンラインで対象文字の認識をラスタスキャン方式で実現する識別処理部で構成されています。デモ展示では、実際の製造ラインに見立てたターンテーブル上の印字をリアルタイムで認識する様子を実演します。
※アネックスホール 2F SSII会場内で、展示を行っています。(12日、13日)
IS1-01
13:30~13:38
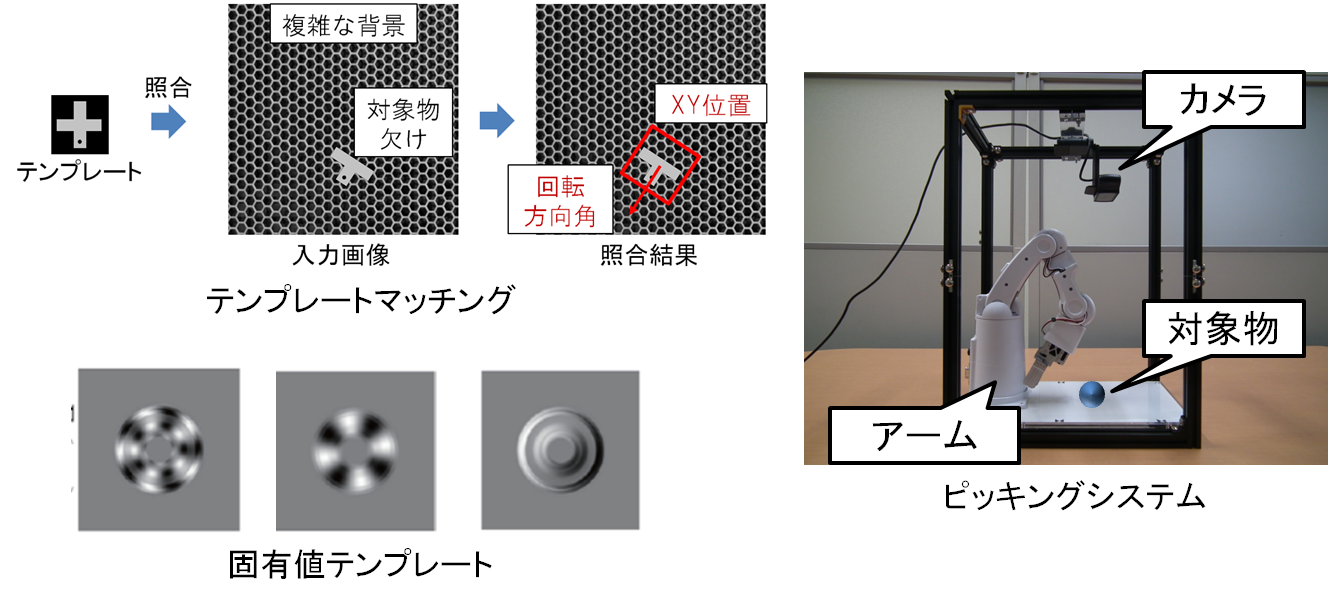
摂動勾配方向特徴を用いたテクスチャレス物体検出
小西嘉典(オムロン),井尻善久(オムロン),川出雅人(オムロン)
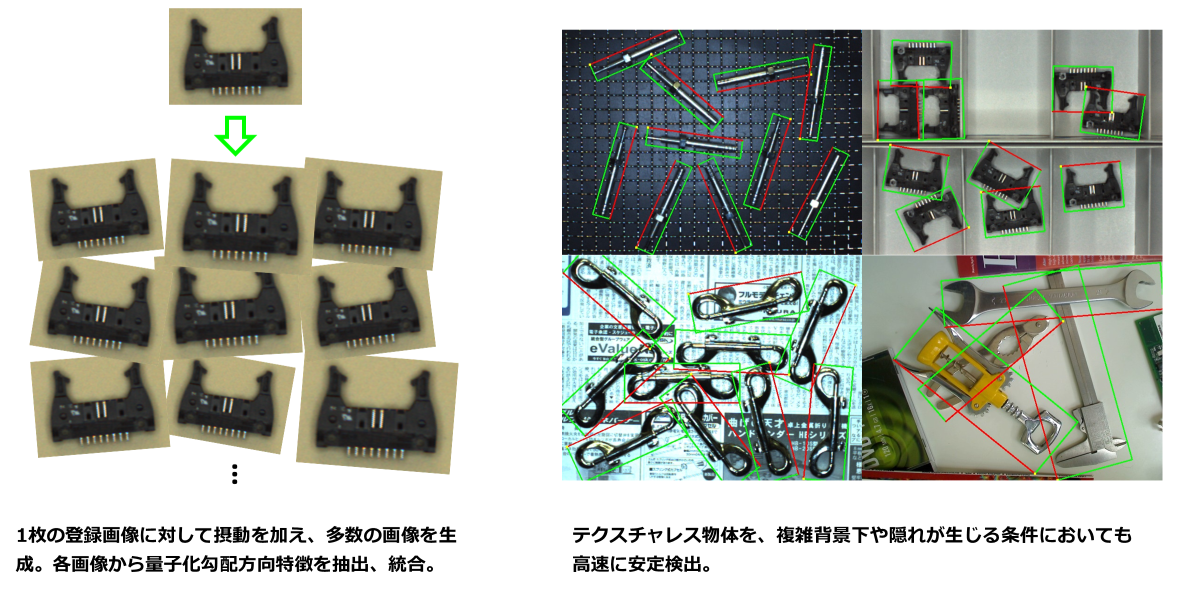
ファクトリーオートメーションやロボットビジョンにおいては、工業製品や生活用品においてよく見られるテクスチャ(模様や文字など)がほとんどない物体を高速に検出することが求められます。我々は1枚のモデル画像に対して平行移動・回転・スケールの各パラメータに摂動を加えた画像を多数生成し、各画像から抽出した量子化勾配方向特徴を画素ごとに累積させることで得られる、摂動勾配方向特徴を新たに考案しました。これにより対象物体固有の見えの変動に対してロバストかつ高速な(30fps以上)テクスチャレス物体検出技術を実現しました。
IS3-23
13:40~13:48
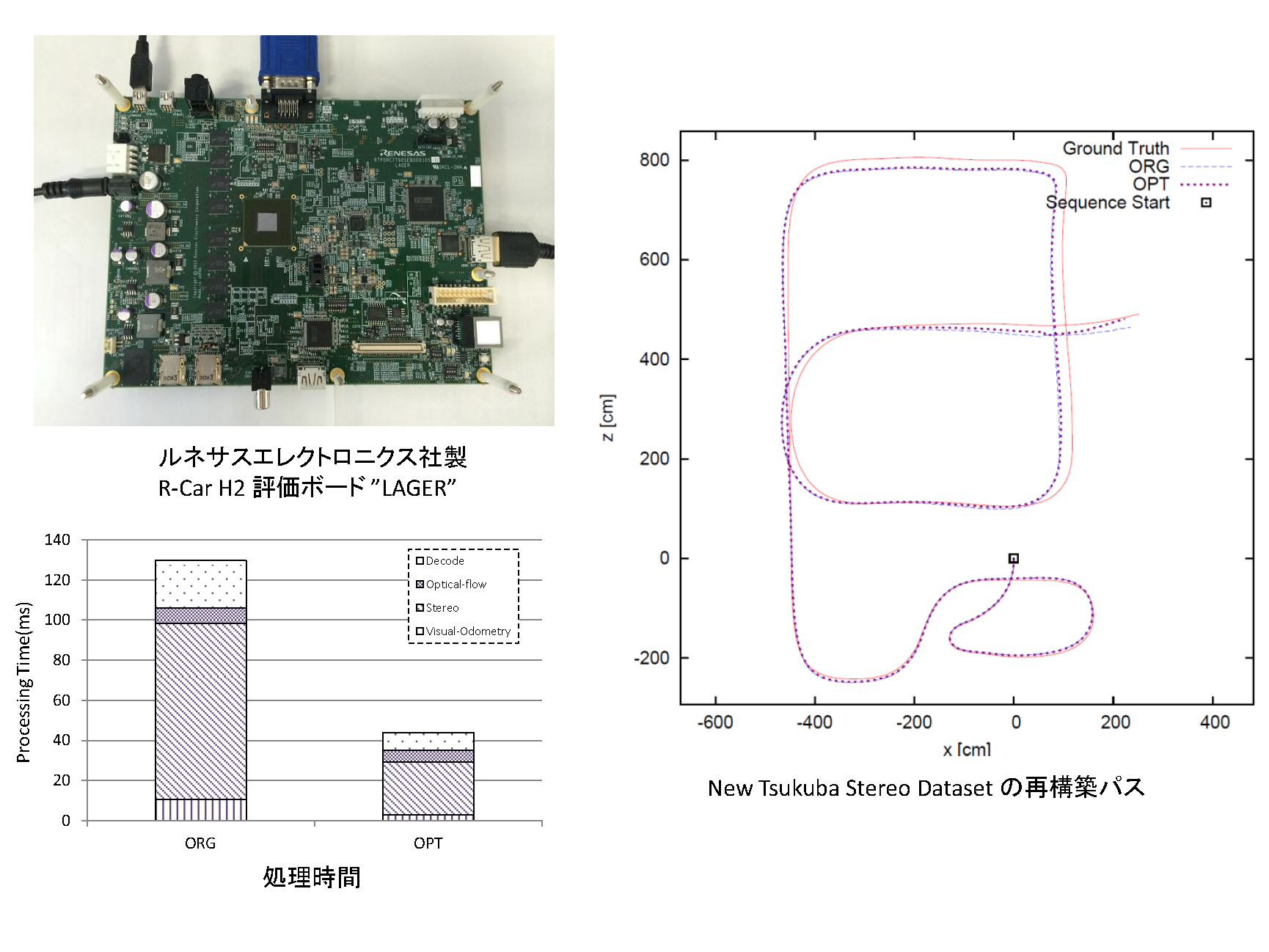
線分特徴を使った車載カメラ画像と地図の照合による自車位置推定
~ライトフィールドセンシングの映像サーベイランスへの応用~
原 孝介(デンソーアイティーラボラトリ) ,鈴木幸一郎(デンソーアイティーラボラトリ),安達仁吾(デンソーアイティーラボラトリ),山野千晴(デンソーアイティーラボラトリ)
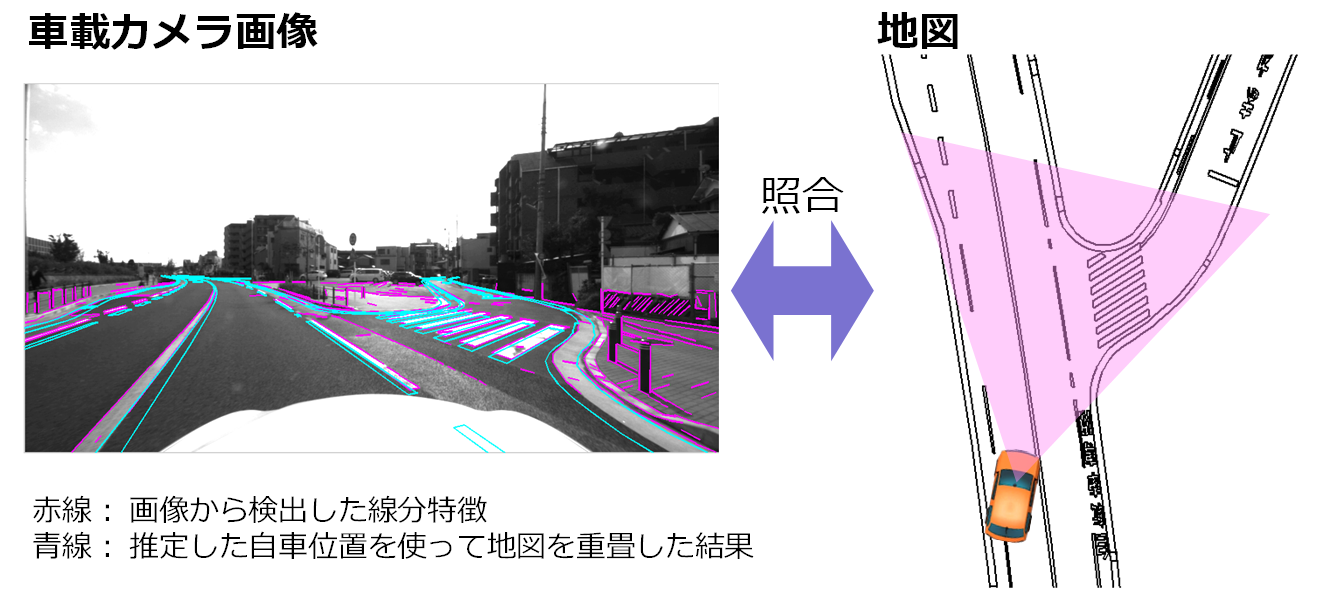
自動車の自動運転や高度安全システムの実現のため、自車位置計測の高精度化が求められています。本研究では車載カメラ画像と地図を照合することで、サブメートル精度で自車位置を推定するシステムを提案いたします。特に照合の基準として『線分』を用いることで、白線、黄線、道路標示、側溝、縁石といった異なる手がかりを一元的に扱えるようにいたしました。
IS3-29
13:50~13:58
インライン運用に向けた高精度ばね計測手法の開発
西郷知泰(名古屋工業大学,マクシス・シントー),田口 亮(名古屋工業大学),梅崎太造(名古屋工業大学)
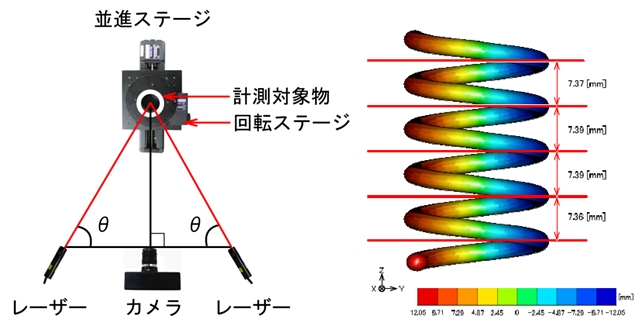
製造業における生産ライン適用を主眼においた光切断法によるばねの全周計測システムを開発しました。実生産においては、ロバスト性に加え、異常発生時の早急な発見及び対処が重要となります。開発システムでは2本のレーザーを設置することによりロバスト/高精度化かつ迅速な異常発見を実現しました。また、簡易に回転軸を含めた校正が可能なキャリブレーション方式を開発し、異常発生時の復旧を容易にしています。