デモンストレーションセッション
ダイジェストムービー
SSII2014デモンストレーションセッションダイジェストムービーを公開しております。
DS 1: デモンストレーションセッション1
6月11日(水) 10:05~17:00
6月12日(木) 10:05~17:00
6月13日(金) 10:05~17:00
1階画像センシング展展示会場内DSゾーン
| DS1-01 |
時間幾何学的整合性を有する動的物体へのプロジェクションマッピング |
| ~動き回る物体にぴたりと貼り付いた映像投影~ |
| 奥村光平(東京大学),末石智大(東京大学),奥 寛雅(群馬大学),石川正俊(東京大学) |
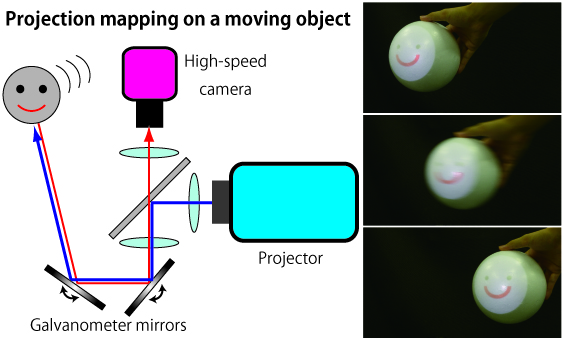 |
| 当研究室ではスポーツのボールなど高速に動き回る物体を常に画像中心に捉え続ける、「サッカードミラー」と呼ばれる高速視線制御デバイスの研究を続けており、今回はサッカードミラーをプロジェクタと組み合わせた「るみぺん」システムをご紹介いたします。近年盛んな静的・準静的なものを対象としたプロジェクションマッピングとは異なり、高速画像処理とミラー制御により対象を高速追従撮影しながら映像投影を行うことで、動的対象にあたかも貼り付いたような映像の投影が可能となります。 |
|
| DS1-02 |
単板撮像素子を用いたリアルタイムマルチバンドイメージングシステム |
| 1ショットで気軽かつ正確に分光情報を取得 |
| 菊地 直(オリンパス研究開発センター),吉崎和徳(オリンパス研究開発センター),小宮康宏(オリンパス研究開発センター),紋野雄介(東京工業大学),金 昌熙(東京工業大学),田中正行(東京工業大学),奥富正敏(東京工業大学) |
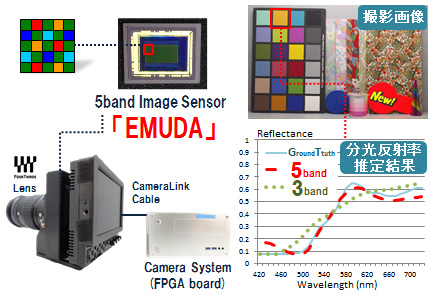 |
| 分光情報が気軽にかつ正確に取得できたとしたら、どんな世界が広がるでしょうか?我々は5バンドのカラーフィルタアレイを備えた単板撮像素子「EMUDA」及び撮像データをリアルタイムで処理するカメラシステムを開発しました。本展示では、小型、安価、簡便、リアルタイムに高精度な分光情報を取得・表示するシステムを展示し、分光情報を利用したさまざまな応用における、従来のRGB(3バンド)カメラに対する有効性を示します。このカメラが導く新しい映像世界を一緒に覗いてみませんか? |
|
| DS1-03 |
匿名カメラ |
| ~プライバシーを光学的に隠蔽する監視カメラシステム~ |
| 張 宇鵬(九州大学),長原 一(九州大学),谷口倫一郎(九州大学) |
| 本デモンストレーションは、11日(水)より展示しております。 |
 |
| 現在、街角には多くの監視カメラが設置され、防犯などその有用性が注目される一方で、取られる側のプライバシーが大きな社会問題となっている。本研究では、撮影画像から人顔を光学的に排除する「匿名カメラ」を提案する。匿名カメラは、赤外線カメラから検出される顔領域をもとに、 カメラ内に搭載された液晶素子で顔を光学的にマスク撮影する。本手法では、根本的に顔が撮影されないため、従来の後処理によるプライバシー保護法に比べ、被撮影者の心理的抵抗も大幅に低減できる。 |
|
| DS1-04 |
LEDパネルとオンボードカメラによるUAVの飛行制御 |
| ~ラジコンヘリコプタの自動飛行を目指して~ |
| 浮田浩行(徳島大学),三輪昌史(徳島大学),造田優貴(徳島大学),茶谷直希(徳島大学) |
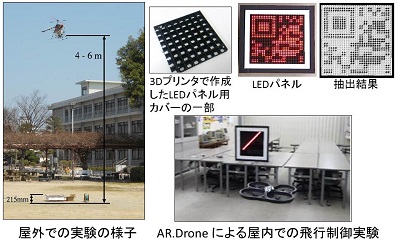 |
| 地上に設置したLEDパネルの表示内容を、無線操縦ヘリコプタに搭載したカメラで読み取り、位置情報や飛行経路の指示をヘリに与えることで、目視では難しい広範囲の飛行での操縦支援、自動飛行制御を目的としています。現在、LEDパネルの表面に自作のカバーを装着して日光の反射を抑えたり、パネルの表示内容に応じて機体を動かす実験を行っています。 |
|
| DS1-05 |
高精度バラ積みピッキングロボットシステム |
| ノンストップ高速ピッキングを目指して |
| 西郷知泰(名古屋工業大学,マクシス・シントー),田口 亮(名古屋工業大学),梅崎太造(名古屋工業大学) |
| 本デモンストレーションは、11日(水)より展示しております。 |
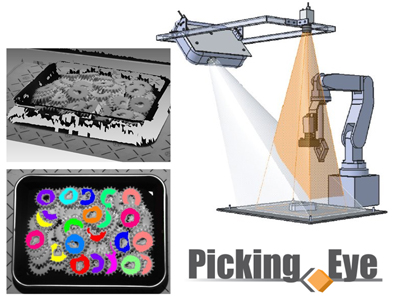 |
| 製品の生産工程では産業用ロボットの活用が進み、3次元センサを使った知的ロボット制御の事例も増えています。しかし、3次元ワーク認識時間(1~2秒)がネックとなり、未導入の工程が多く存在します。そこで3次元計測のため毎回複数枚の撮影が必要であった部分を、ピッキング中は1枚の画像の投影だけで実現するシステムを開発しました。このシステムにより3次元計測を意識せず、最適なロボット動作での最速ピッキングが実現できます。 |
|
| DS1-06 |
シャドーモアレ法による高精度平面度計測 |
| ~大きな物体の平面度や三次元形状を高精度に計測~ |
| 森本吉春(4Dセンサー),柾谷明大(4Dセンサー),高木哲史(4Dセンサー) |
| 本デモンストレーションは、11日(水)より展示しております。 |
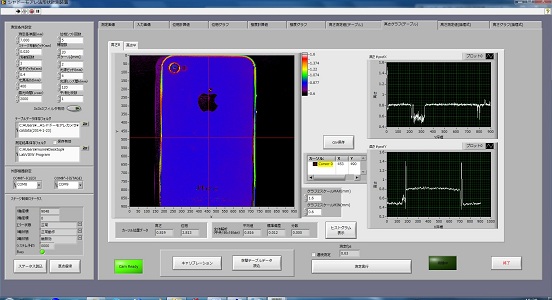 |
| 新しく開発した特許技術である「光源切替位相シフトシャドーモアレ法」を用いて、平面状物体の三次元形状を高速かつ高精度に計測します。
・高速:実時間処理10fps(将来は2000fps)
・高精度:誤差3μm,標準偏差3μm
図はこのシャドーモアレカメラの計測結果表示画面です。高さを色で表示しており、等色だと同じ高さです。このモバイルの平面部はほぼ均一であり、精度が良く、周辺の高い部分は色が変わっており、均一な高さ分布でないことが判ります。
|
|
| DS1-07 |
ワンショット型デジタルホログラフィ三次元計測装置 |
| ~安定かつ高速・高精度な小型三次元計測装置~ |
| Yu Qiyue(名古屋工業大学),田口 亮(名古屋工業大学),保黒政大(中部大学),梅崎太造(名古屋工業大学),堀米秀嘉(3Dragons) |
| 本デモンストレーションは、11日(水)より展示しております。 |
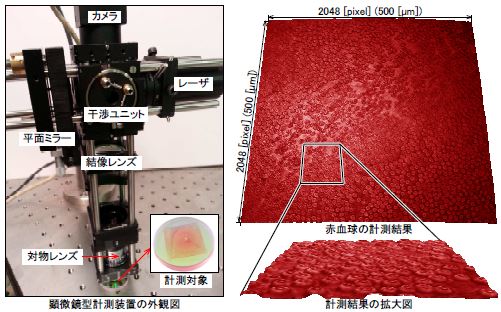 |
| ワンショット位相シフトデジタルホログラフィを用いて、高速・高精度の三次元計測装置を開発しました。従来の装置で計測が困難である透明物体や鏡面反射物体の三次元形状を2.9 [nm]の精度と60 [ms]の計測速度で計測できました。また、計測装置に使用するレンズシステムにより、顕微鏡レベル(0.5×0.5 [mm])から広視野(20×20[mm])の三次元計測が実現できました。さらに、ワンショットで物体の形状を計測するため、安定な精密三次元計測が実現できました。 |
|
| DS1-08 |
空間に浮かぶ3次元立体映像ディスプレイ「Holo-Deck」 |
| ~新しい高臨場感3次元空間映像表示方法の提案~ |
| 堀米秀嘉(3Dragons),小池一郎(3Dragons),梅崎太造(名古屋工業大学) |
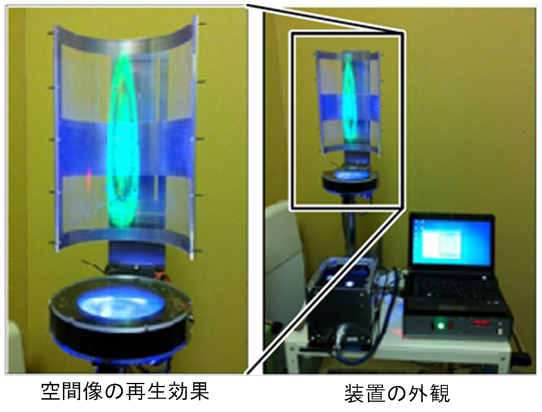 |
| ダイレクト光スキャニング方式と反射型ホログラフィックスクリーンを組み合わせ、立体感を向上させたHolo-Deckを試作しました。超高速空間光変調デバイスと指向性スキャンニングプレートを用いて、高空間解像度の3次元立体映像コンテンツを空間上に浮かせて表示します。透明なホログラフィックスクリーンの前の空間に浮かぶ、世界で初めての高臨場感3次元ディスプレイの表示デモを、展示場でぜひご覧ください。 |
|
DS 2: デモンストレーションセッション2
6月12日(木) 10:05~17:00
6月13日(金) 10:05~17:00
2階DSゾーン
| DS2-01 |
生成型学習による歪みにロバストな高速印字認識システム |
| ~FA分野への適用を目的とした新たな文字認識フレームワークの提案~ |
| 村井泰裕(日立産業制御ソリューションズ),桐生 望(日立産業制御ソリューションズ),鈴木寿法(日立産業制御ソリューションズ),藤吉弘亘(中部大学) |
 |
| 生成型学習を導入したRandom Forestsを用いて、高速に歪んだ印字を認識することが可能なシステムを開発しました。
本システムでは、オフラインで少数枚の印字切り出し画像に対しさまざまなパラメータで変形させた画像を自動生成し、Random Forestsの学習を行うことで識別器を構築する学習処理部と、オンラインで対象文字の認識をラスタスキャン方式で実現する識別処理部で構成されています。
デモ展示では、実際の製造ラインに見立てたターンテーブル上の印字をリアルタイムで認識する様子を実演します。
|
|
| DS2-02 |
体型センシングを用いた仮想試着システムの提案 |
| ~体型に応じた衣服画像合成によりフィット感向上~ |
| 関根真弘(東芝研究開発センター),杉田 馨(東芝研究開発センター),西山正志(東芝研究開発センター),フランク ペルベー(東芝欧州研究所 ケンブリッジ研究所),ビヨン シュテンガー(東芝欧州研究所 ケンブリッジ研究所) |
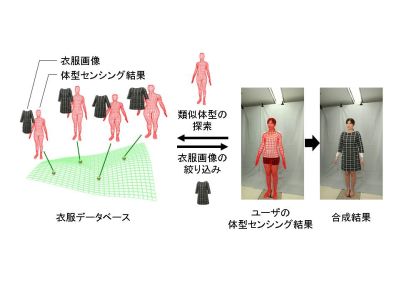 |
| ユーザの体型を考慮した仮想試着向け画像合成手法を提案します。ワンショットの奥行きデータから体型を推定する体型センシングを用いて、さまざまな体型の人物で撮影した衣服画像と体型センシング結果とを対応付け、衣服データベースを構築しておきます。ユーザに対しても同様に体型センシングを行い、衣服データベースから適した衣服画像を絞り込みます。その衣服画像をユーザに合成することで、体型を考慮しない場合に比べてフィット感が向上しました。
|
|
| DS2-03 |
カメラの移動撮影に基づくオンライン3次元計測システム |
| ~その場で手軽に高品質な3次元形状を計測~ |
| 山尾創輔(東北大学),三浦 衛(東北大学),酒井修二(東北大学),伊藤康一(東北大学),青木孝文(東北大学) |
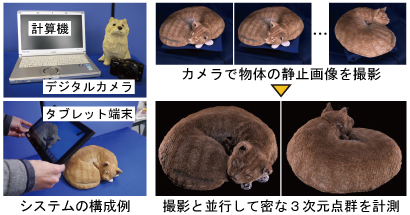 |
| 物体形状の密な3次元計測は、さまざまな分野で注目されています。近年では、カメラで撮影した物体の静止画像から高品質な3次元形状を計測する手法が提案されています。ただし、入力画像が変わるたびに計測処理をやり直す必要があるため、再計測に時間を要し、その場での計測に向いていません。
提案システムは、カメラで物体の静止画像を撮影するだけで、その場で結果を確認しながらでも密な3次元形状を計測することができます。 |
|
| DS2-04 |
リアルタイムプロジェクタ・ステレオカメラシステム |
| ~波打つスクリーンにぴったり映像を表示~ |
| 川島直揮(東北大学),酒井修二(東北大学),三浦 衛(東北大学),伊藤康一(東北大学),青木孝文(東北大学) |
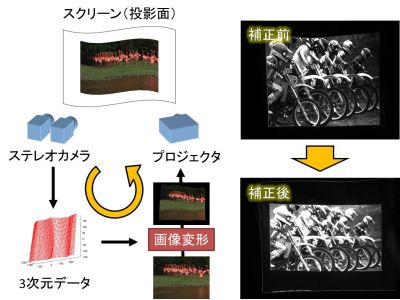 |
| 波打つスクリーンにプロジェクタの映像を歪みなく投影するシステムを展示します。プロジェクタで投影された画像をカメラで撮影し、スクリーンの形状を計測することで、投影する画像の幾何補正を行うことができます。これまでは、幾何補正のためにスクリーンにパターン光を投影する必要があり、スクリーンの動的な変化に対応できませんでした。これに対し、ステレオカメラとプロジェクタを組み合わせることで、映像を投影しながらリアルタイムに幾何補正が可能なシステムを開発しました。
|
|
| DS2-05 |
スマートフォンを用いた肌判定システムの開発 |
| ~あなたの肌はきれいかな?~ |
| 神戸美智子(名古屋工業大学),田口 亮(名古屋工業大学),保黒政大(中部大学),梅崎太造(名古屋工業大学),松岡建志(マクセルスマートコミュニケーションズ) |
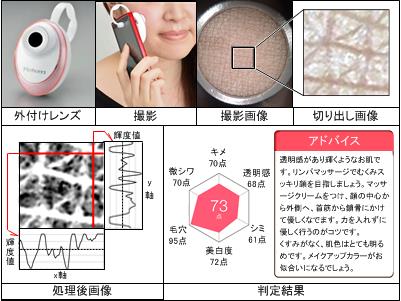 |
| 本システムでは、スマホにアタッチメント式カメラを装着するだけで手軽に肌判定ができます。
従来、専門知識と高価な撮影装置を必要としましたが、安価な小型カメラで撮影した肌画像をサーバー側に送るだけで、詳細な肌分析結果とそれに対する専門家のアドバイスが得られます。
現在、iOS、Android用アプリケーションとしてネットサービスを展開しています。
|
|
| DS2-06 |
対話的能動学習による超高速ビッグデータ解析 |
| ~震災ビッグデータを瞬時にタグ付けします~ |
| 木村大毅(東京工業大学),水野俊一郎(東京工業大学),長谷川修(東京工業大学) |
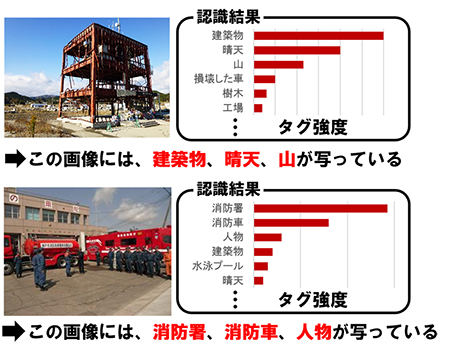 |
| 発表者らが独自に開発を進めている“SOINN”と呼ぶ機械学習手法を活用した、ビッグデータ解析の一例をデモ展示する。
展示デモは、先日の東日本大震災の時に撮影された膨大な画像と、インターネット上のノイジーな画像を用いて、120種類程度の写っている物体や状況を学習し、実際の震災画像やネット画像にタグ付けを実施する。
瞬時に認識結果が確認できるシステムを採用しているため、使用者は対話的に学習画像を選択することができる。
図は共に震災時に撮影された画像であり、タグ付け結果である。
|
|
| DS2-07 |
インスタント3D復元による位置情報付き画像データベース構築とその利用 |
| ~画像からの3D復元を応用した自己位置認識アプリケーション!~ |
| 鳥居秋彦(東京工業大学),井上優希(東京工業大学),董 亜飛(東京工業大学),杉浦貴行(東京工業大学),奥富正敏(東京工業大学) |
 |
| コンシューマ向けの広範囲視野カメラを用いて3D復元を行い、位置情報付きデータベースを構築するシステムの提案です。要求される作業は対象となるシーンの撮影のみであることから、特別な技術・知識を持った専門家でなくても、屋内外の詳細な情報のデータベース化が可能です。さらに、構築したデータベースに対して、新たに撮影した画像をクエリとした照合を行うことで、その撮影位置を高速に推定することも可能です。警備や監視などの巡回記録、作業現場の異常検出、ナビゲーションなどさまざまなサービスへの応用が期待できる技術です。
|
|















